Electric Underwater Scooter (v1)
A working electric underwater scooter built in two days on a tight budget under $50. Using a custom 3D-printed housing, it achieves speeds up to 3 km/h underwater with a simple design focused on cost over complexity.
Design & Inspiration
I wanted a way to move through water without spending hundreds on a commercial unit. The design phase focused on rapid prototyping. I drafted 3D models from scratch to hold the batteries and fit the motors. The project proved that a working underwater vehicle could be built in a weekend.
Hardware & Electronics
To keep costs under $50, I skipped an Electronic Speed Controller (ESC) and drove the motor directly.
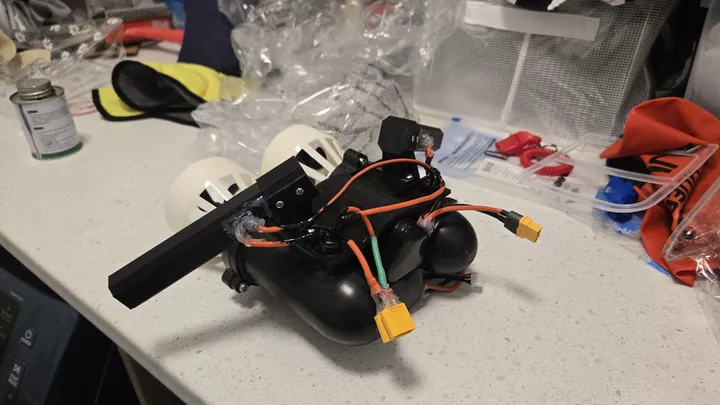
- Power Source — Two 3S 21700 lithium battery packs power the thrusters.
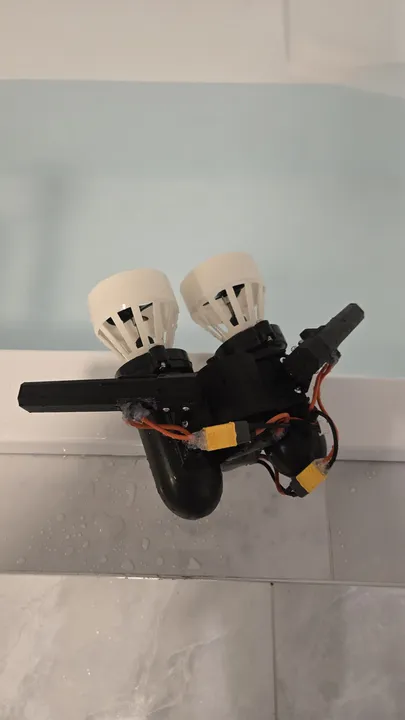
- Housing — Custom 3D-printed to enclose the components.
- Direct Control — A heavy-duty physical switch closes the circuit. No ESC means no speed control, but the design stays simple.
- Voltage Monitoring — An ESP32-C3 reads battery voltage and displays the status on an external LED to prevent over-discharge.
Software & Logic
With direct motor control via switch, no complex logic is needed for propulsion. The ESP32-C3 firmware monitors battery voltage and displays status on the LED.
Challenges & Lessons Learned
- Direct Drive — Operating without an ESC keeps the system simple and durable, but eliminates speed control. The motor runs at full power or off.
- Version 1 Constraints — This version proved the concept and identified the need for speed control and better sealing in future builds.
Built at 16 years 3 months